










Het arrangement RoboColors is gemaakt met Wikiwijs van Kennisnet. Wikiwijs is hét onderwijsplatform waar je leermiddelen zoekt, maakt en deelt.
- Auteurs
- Laatst gewijzigd
- 13-06-2015 13:53:55
- Licentie
-



Dit lesmateriaal is gepubliceerd onder de Creative Commons Naamsvermelding-GelijkDelen 3.0 Nederland licentie. Dit houdt in dat je onder de voorwaarde van naamsvermelding en publicatie onder dezelfde licentie vrij bent om:
- het werk te delen - te kopiëren, te verspreiden en door te geven via elk medium of bestandsformaat
- het werk te bewerken - te remixen, te veranderen en afgeleide werken te maken
- voor alle doeleinden, inclusief commerciële doeleinden.
Meer informatie over de CC Naamsvermelding-GelijkDelen 3.0 Nederland licentie.
Aanvullende informatie over dit lesmateriaal
Van dit lesmateriaal is de volgende aanvullende informatie beschikbaar:
- Toelichting
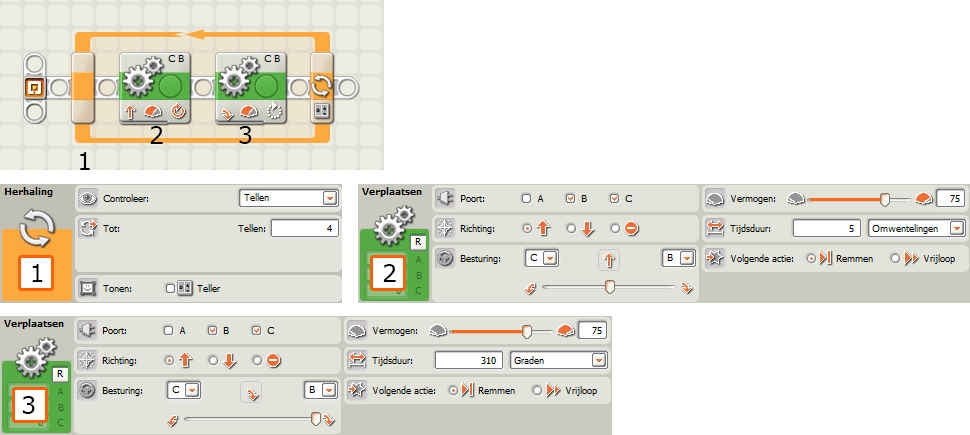
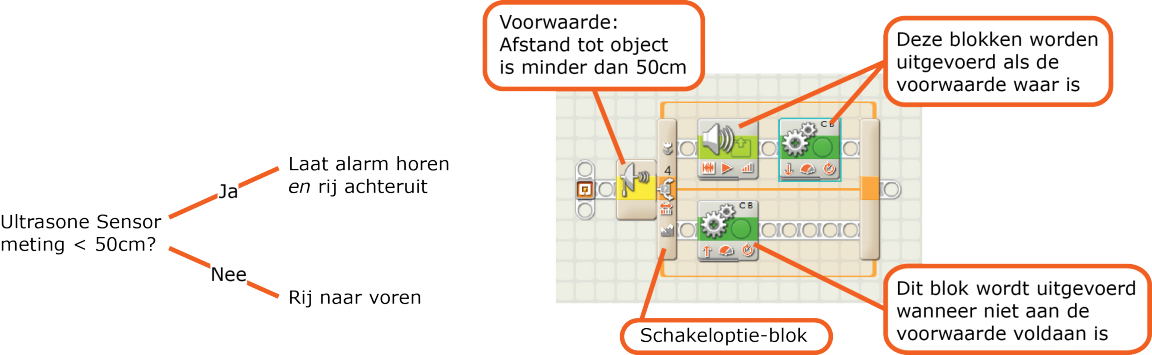
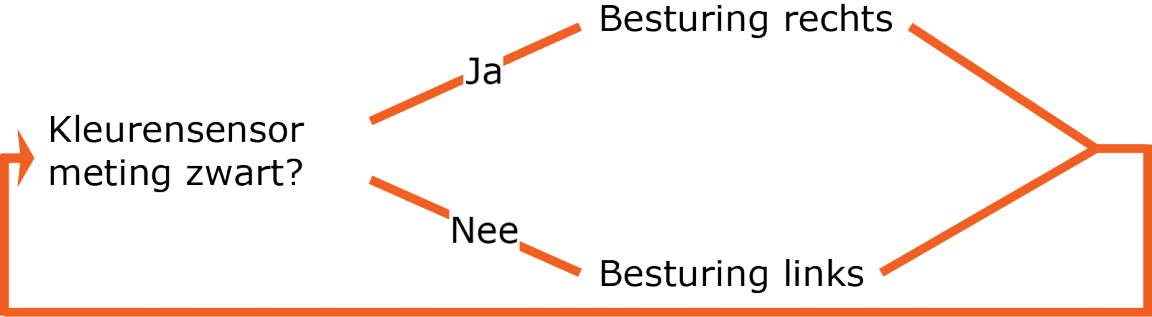
- Deze multidisciplinaire module over sensortechnologie en robotica is gemaakt door studenten van de lerarenopleiding aan de Universiteit Twente als onderdeel van het vak bètadidactiek. In deze praktisch module wordt met behulp van Lego Mindstorms kennis gemaakt met robotica en kleurensensor. De module draagt bij aan de ontwikkeling van de zogenaamde '21st century skill' logisch denken. In deze module wordt de kennis uit de vakgebieden Natuurkunde, Wiskunde en Informatica toegepast en verbreedt: de werking van de kleursensor past binnen het vak Natuurkunde, Algoritmes sluiten aan bij Wiskunde en Informatica en het programmeren van de robot past binnen Informatica.
- Leerniveau
- VWO 4;
- Leerinhoud en doelen
- Natuur, leven en technologie; Informatica; Wiskunde A; Natuurkunde;
- Eindgebruiker
- leerling/student
- Moeilijkheidsgraad
- gemiddeld
- Trefwoorden
- algoritmen, kleuren, lego, mindstorms, programmeren, robotica, sensortechnologie