

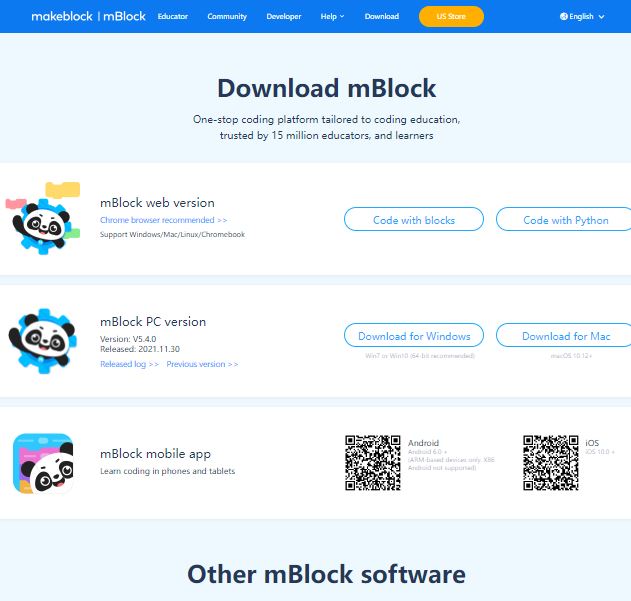



 In deze keuze balk kan je naar beneden scrollen onderin zie je de
In deze keuze balk kan je naar beneden scrollen onderin zie je de  knop Extensie.
knop Extensie. Klik daar op.
Klik daar op.

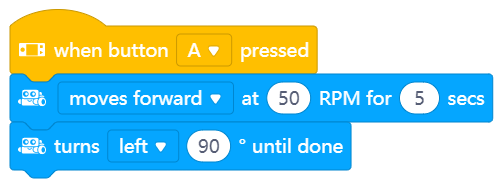
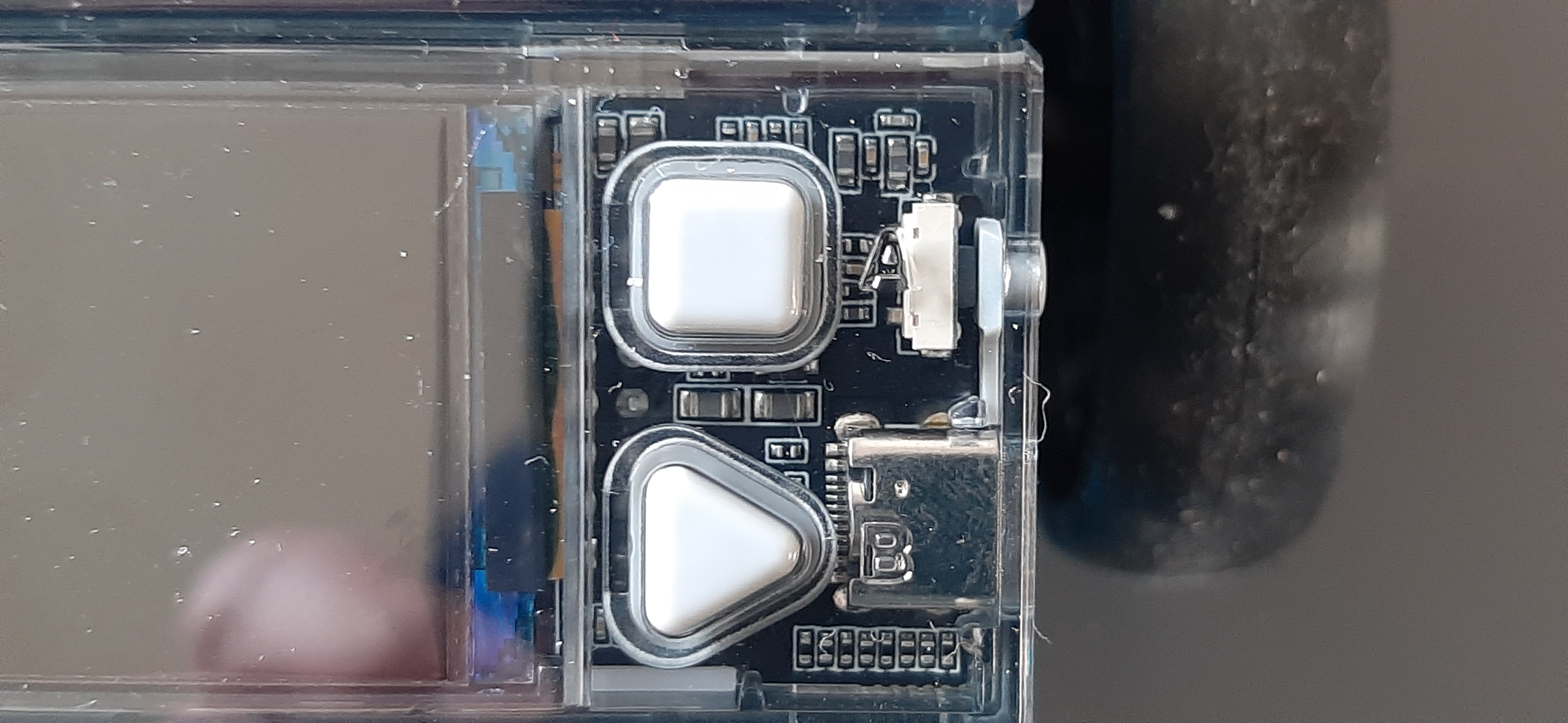
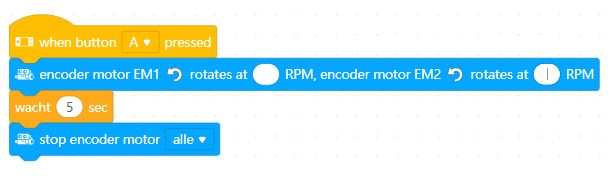
 zodat de robot pas rijdt als je op knop A drukt.
zodat de robot pas rijdt als je op knop A drukt.
 Als je je robot vooruit kunt laten rijden en een hoek van 90 graden kunt laten maken weet je genoeg om je robot ook in een vierkant te laten rijden.
Als je je robot vooruit kunt laten rijden en een hoek van 90 graden kunt laten maken weet je genoeg om je robot ook in een vierkant te laten rijden.




 T
T

Het arrangement Palet mBot2 Robot v1 is gemaakt met Wikiwijs van Kennisnet. Wikiwijs is hét onderwijsplatform waar je leermiddelen zoekt, maakt en deelt.
- Auteurs
- Laatst gewijzigd
- 03-09-2024 10:41:31
- Licentie
-


Dit lesmateriaal is gepubliceerd onder de Creative Commons Naamsvermelding 4.0 Internationale licentie. Dit houdt in dat je onder de voorwaarde van naamsvermelding vrij bent om:
- het werk te delen - te kopiëren, te verspreiden en door te geven via elk medium of bestandsformaat
- het werk te bewerken - te remixen, te veranderen en afgeleide werken te maken
- voor alle doeleinden, inclusief commerciële doeleinden.
Meer informatie over de CC Naamsvermelding 4.0 Internationale licentie.
Aanvullende informatie over dit lesmateriaal
Van dit lesmateriaal is de volgende aanvullende informatie beschikbaar:
- Toelichting
- Palet lessen mBot2 robot
- Eindgebruiker
- leerling/student
- Moeilijkheidsgraad
- gemiddeld
Bronnen
| Bron | Type |
|---|---|
|
Achteruit inparkeren https://youtu.be/8YojOpL5uSk?rel=0 |
Video |