

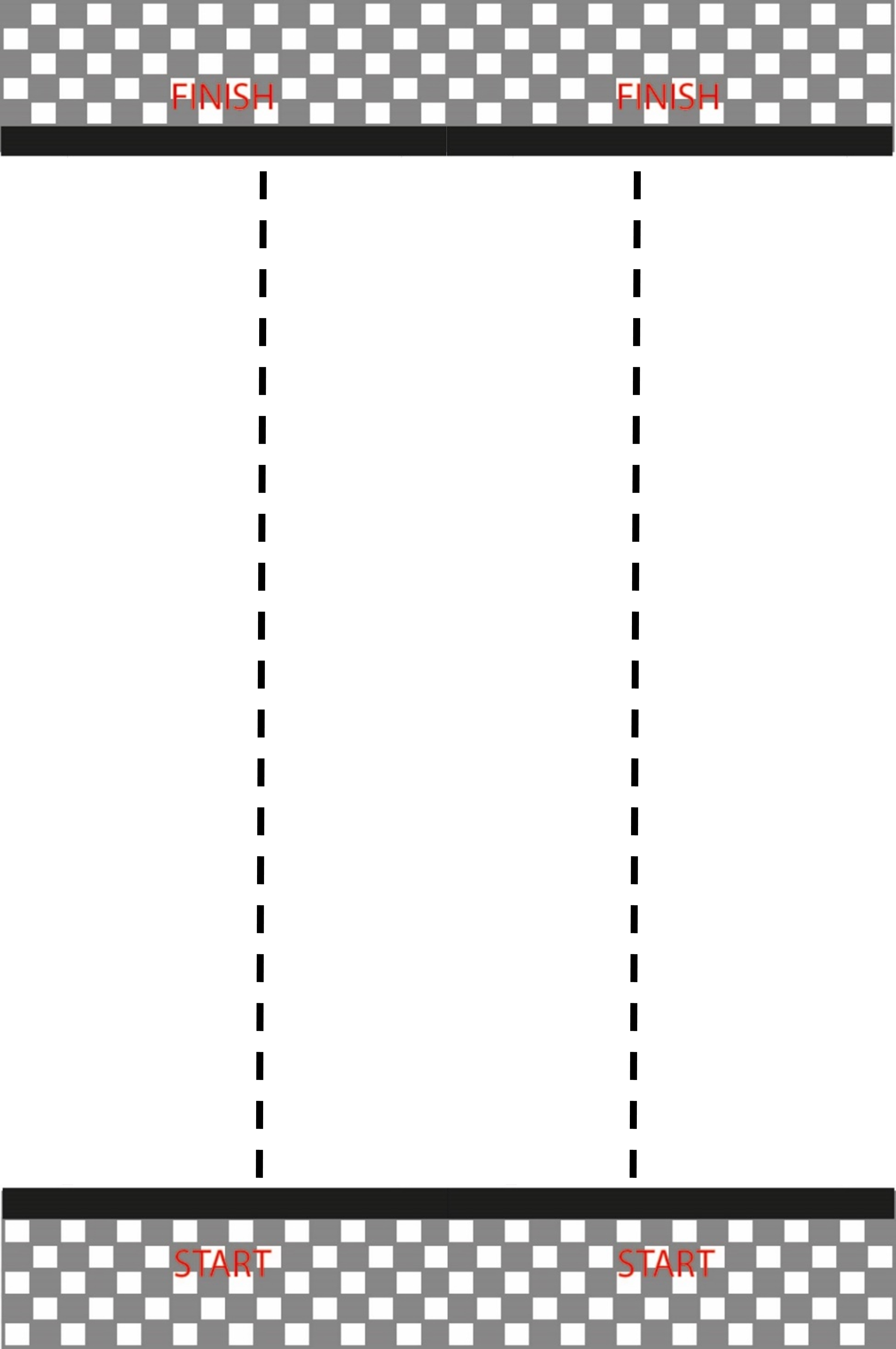

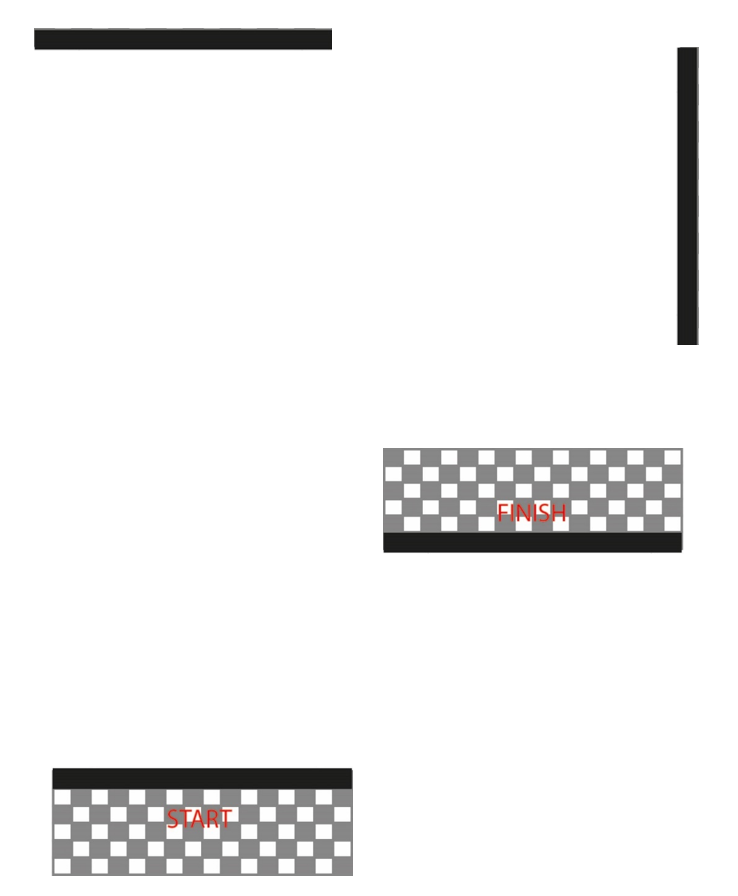
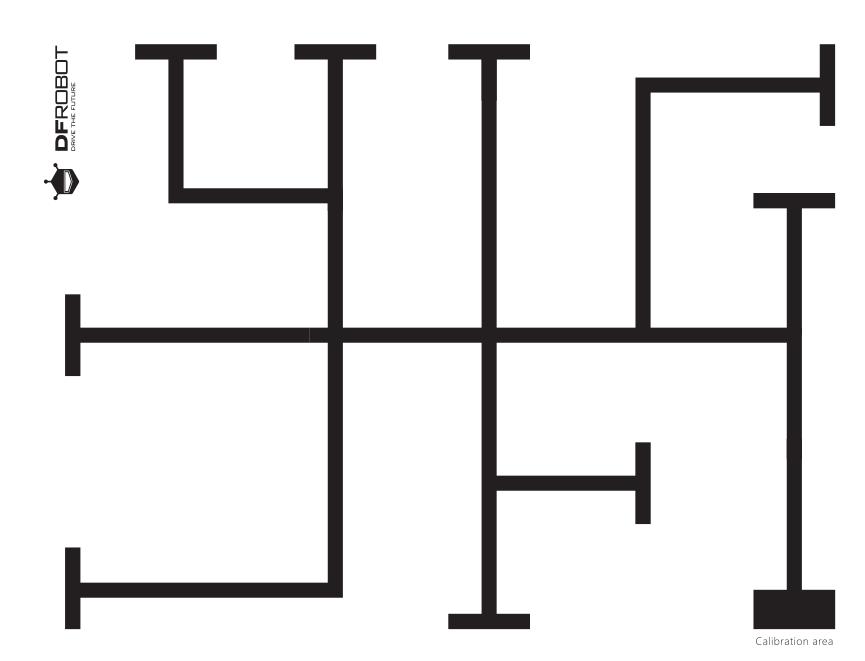
 Gebruik voor deze opdracht het blad met twee vierkanten.
Gebruik voor deze opdracht het blad met twee vierkanten.
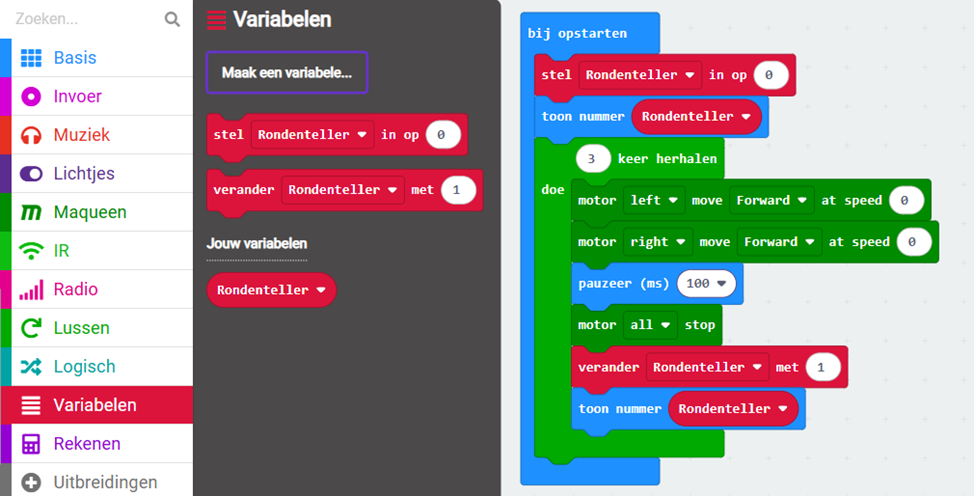
 Opdracht:
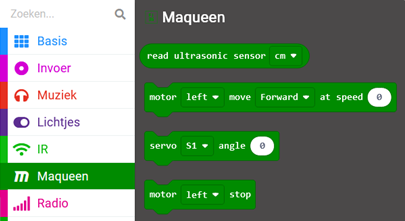
Opdracht:  Aan de onderkant van de Maqueen zitten twee sensoren.
Aan de onderkant van de Maqueen zitten twee sensoren.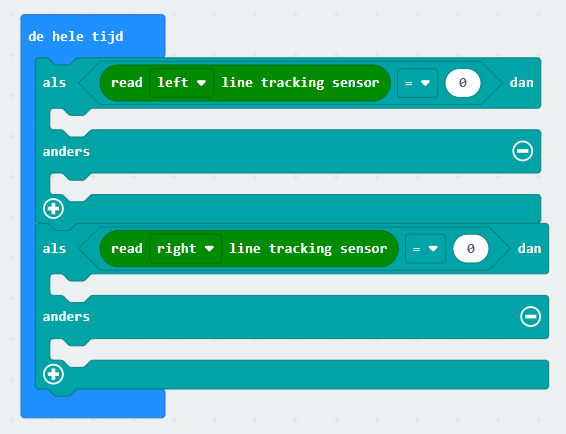
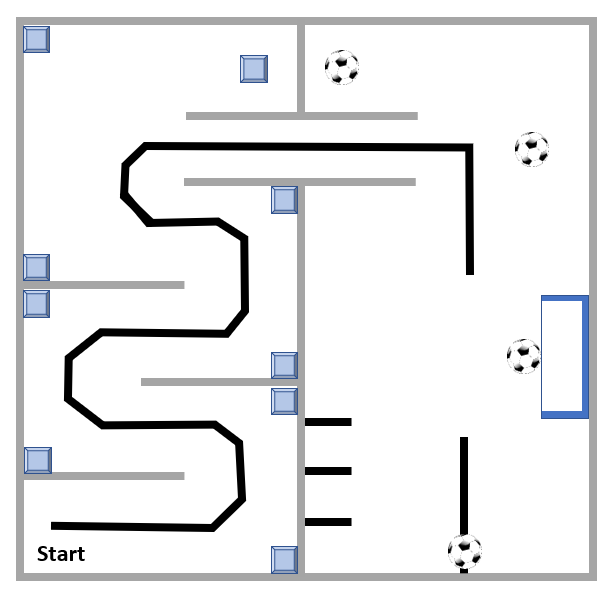
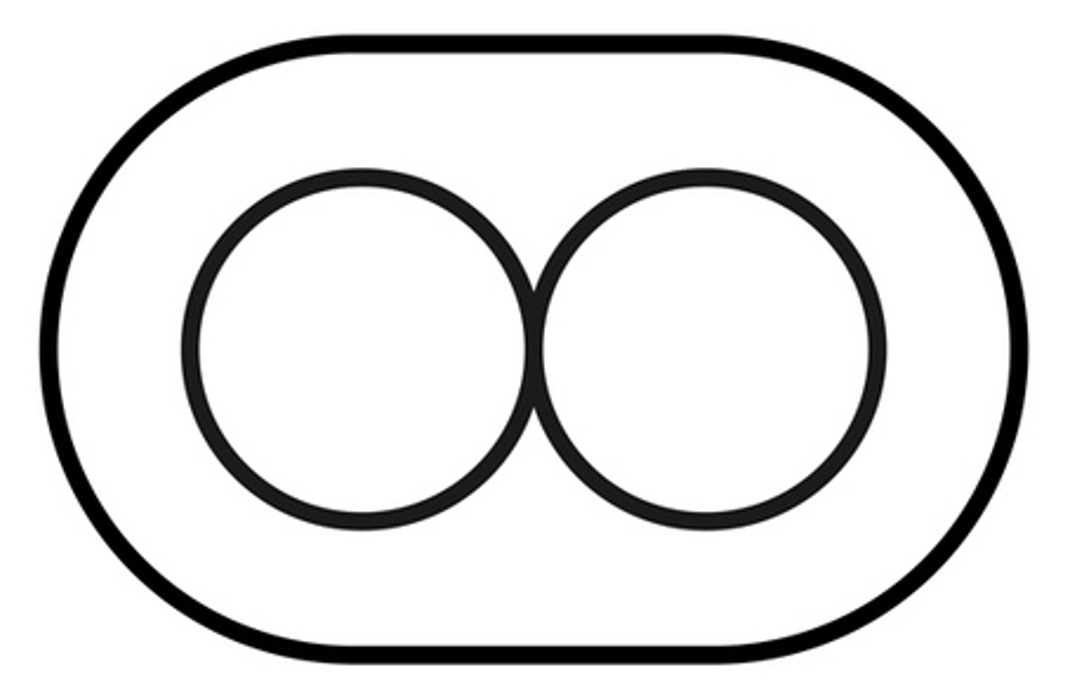 Gebruik de buitenste zwarte lijn op de line tracking map. Gebruik voor de code beide tracking sensoren.
Gebruik de buitenste zwarte lijn op de line tracking map. Gebruik voor de code beide tracking sensoren.

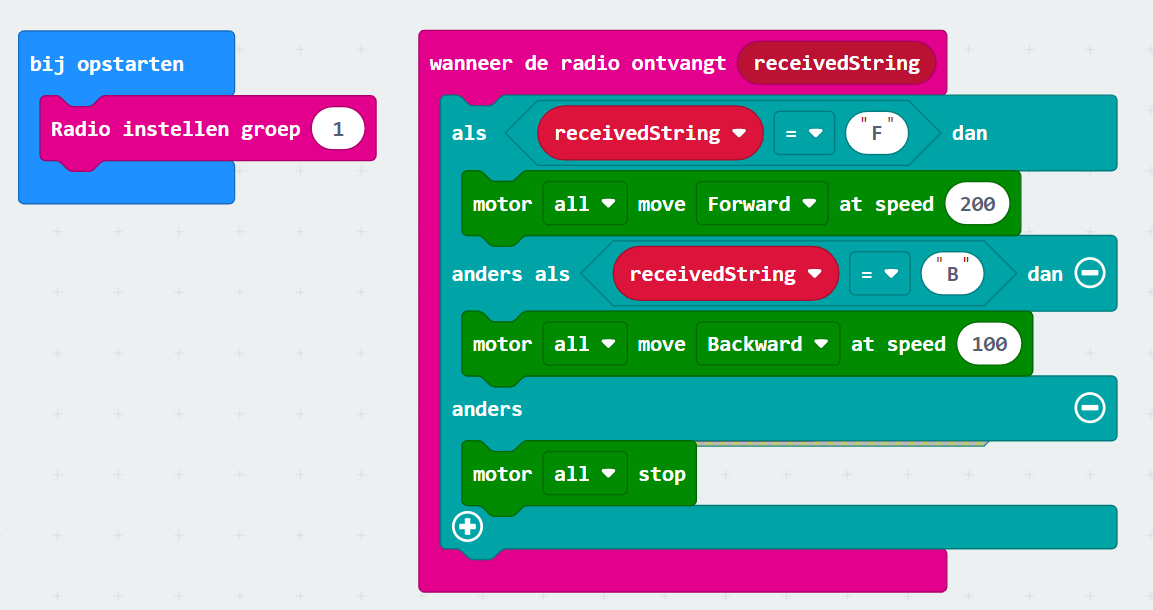
 Planet Robot is een wedstrijd van 3 minuten waar vier tot zes teams tegen elkaar spelen.
Planet Robot is een wedstrijd van 3 minuten waar vier tot zes teams tegen elkaar spelen.
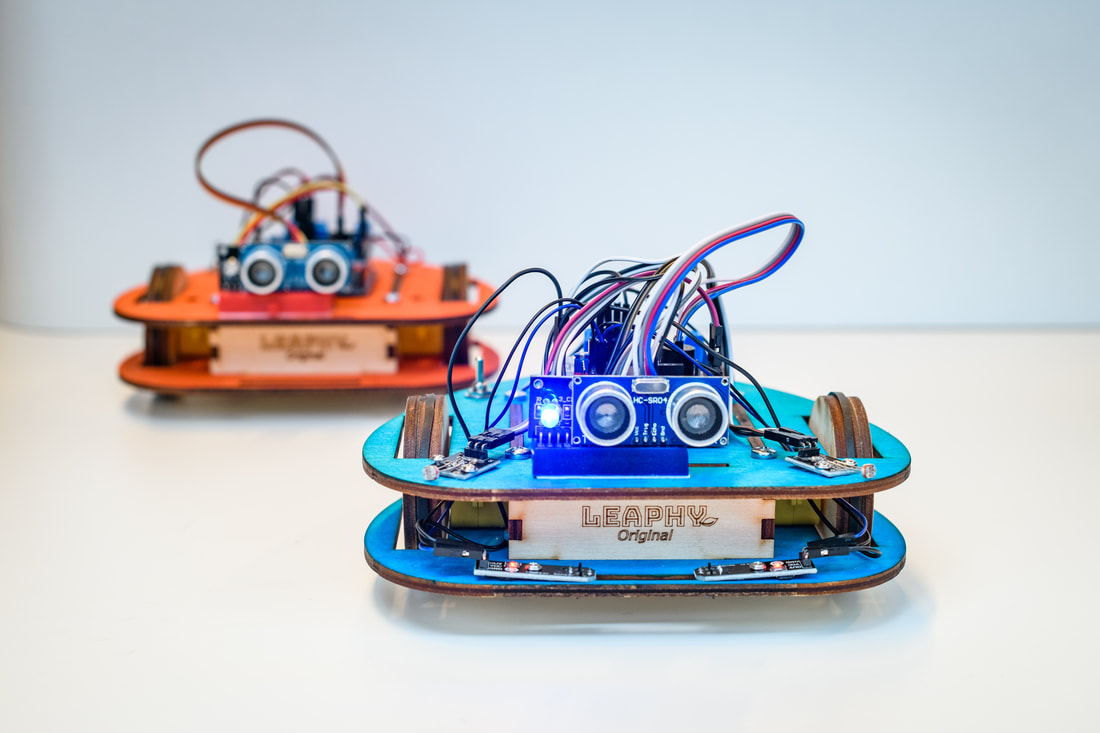
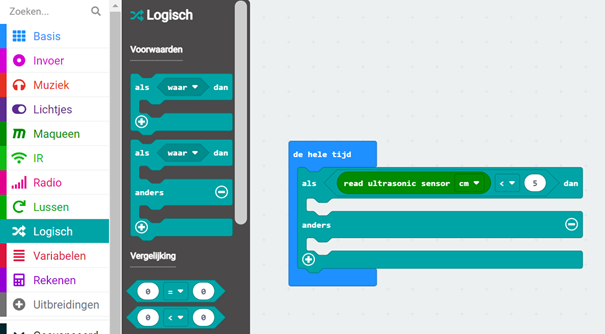
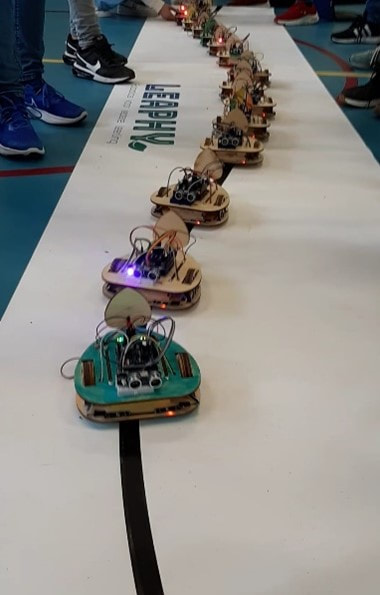 Om een robottrein te maken gebruik je een programma waarbij de Leaphy een zwarte lijn volgt, en tegelijk zorgt dat hij niet botst met de Leaphy die voor hem rijdt.
Om een robottrein te maken gebruik je een programma waarbij de Leaphy een zwarte lijn volgt, en tegelijk zorgt dat hij niet botst met de Leaphy die voor hem rijdt.
Het arrangement Programmeren met Micro:Maqueen is gemaakt met Wikiwijs van Kennisnet. Wikiwijs is hét onderwijsplatform waar je leermiddelen zoekt, maakt en deelt.
- Auteur
- Laatst gewijzigd
- 05-09-2025 09:07:53
- Licentie
-


Dit lesmateriaal is gepubliceerd onder de Creative Commons Naamsvermelding 4.0 Internationale licentie. Dit houdt in dat je onder de voorwaarde van naamsvermelding vrij bent om:
- het werk te delen - te kopiëren, te verspreiden en door te geven via elk medium of bestandsformaat
- het werk te bewerken - te remixen, te veranderen en afgeleide werken te maken
- voor alle doeleinden, inclusief commerciële doeleinden.
Meer informatie over de CC Naamsvermelding 4.0 Internationale licentie.
Aanvullende informatie over dit lesmateriaal
Van dit lesmateriaal is de volgende aanvullende informatie beschikbaar:
- Toelichting
- In deze module vind je opdrachten om kennis te maken met de Maqueen robot. Die werkt met een micro:bit.
- Eindgebruiker
- leerling/student
- Moeilijkheidsgraad
- gemiddeld