


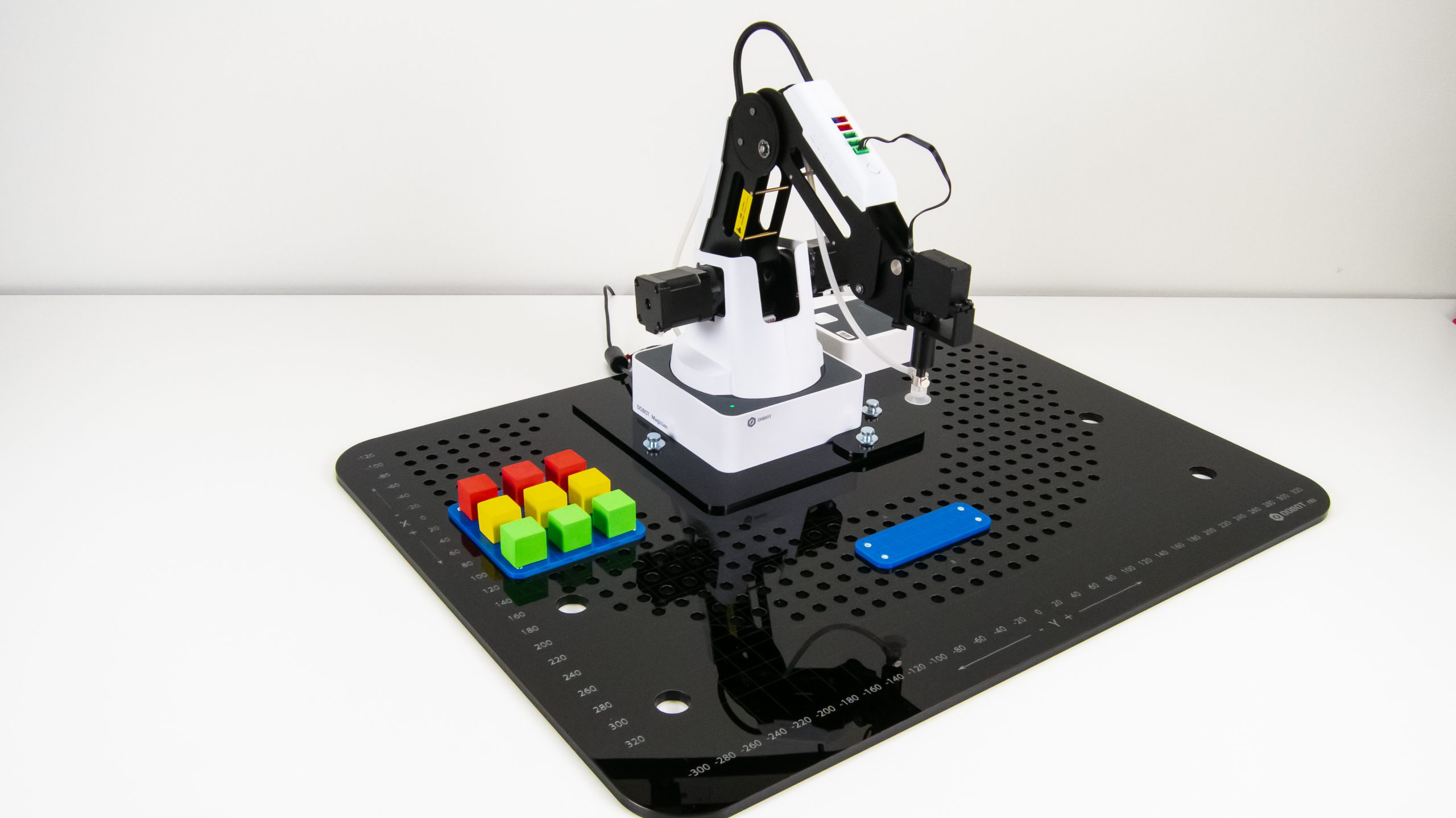

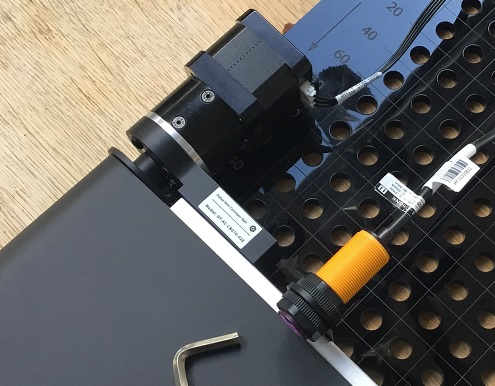
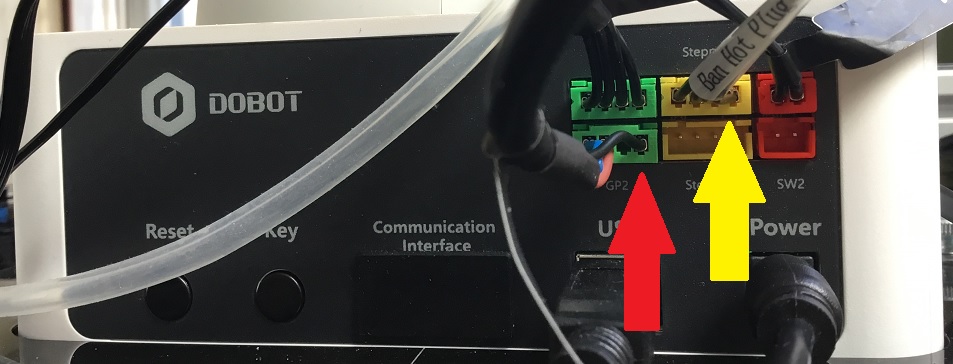
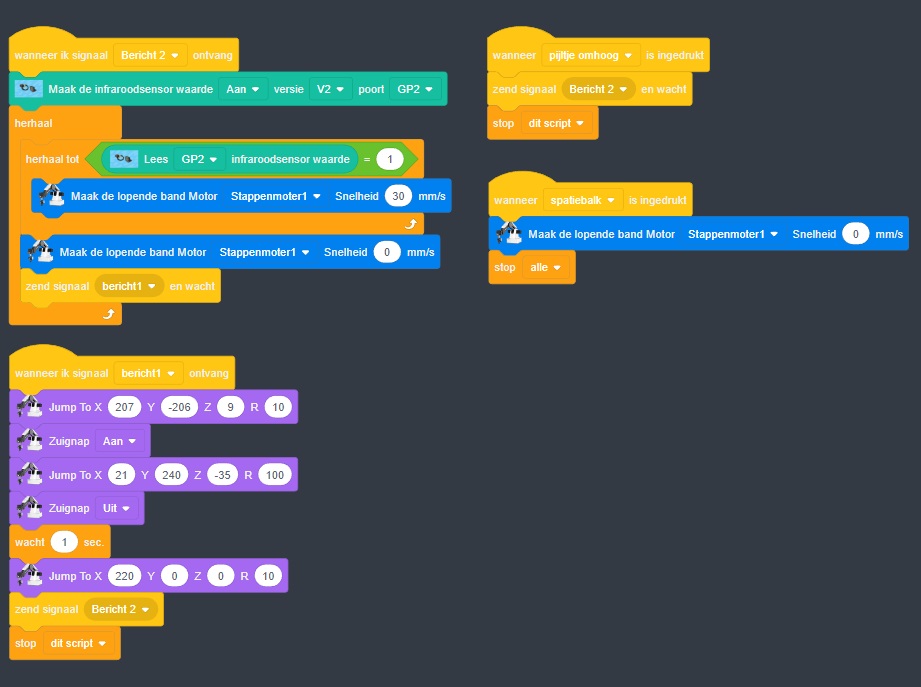
 Monteer de IR-sensor aan de lopende band vast en sluit de draden aan op de achterzijde van de robotarm. IR-sensor in GP2 (rode pijl). Lopendeband motor in Stepper 1 (gele pijl).
Monteer de IR-sensor aan de lopende band vast en sluit de draden aan op de achterzijde van de robotarm. IR-sensor in GP2 (rode pijl). Lopendeband motor in Stepper 1 (gele pijl).

Het arrangement Dobot Robotarm is gemaakt met Wikiwijs van Kennisnet. Wikiwijs is hét onderwijsplatform waar je leermiddelen zoekt, maakt en deelt.
- Auteur
- Laatst gewijzigd
- 23-01-2026 12:12:55
- Licentie
-


Dit lesmateriaal is gepubliceerd onder de Creative Commons Naamsvermelding 4.0 Internationale licentie. Dit houdt in dat je onder de voorwaarde van naamsvermelding vrij bent om:
- het werk te delen - te kopiëren, te verspreiden en door te geven via elk medium of bestandsformaat
- het werk te bewerken - te remixen, te veranderen en afgeleide werken te maken
- voor alle doeleinden, inclusief commerciële doeleinden.
Meer informatie over de CC Naamsvermelding 4.0 Internationale licentie.
Aanvullende informatie over dit lesmateriaal
Van dit lesmateriaal is de volgende aanvullende informatie beschikbaar:
- Toelichting
- Dobot Robotarm
- Eindgebruiker
- leerling/student
- Moeilijkheidsgraad
- gemiddeld
- Studiebelasting
- 4 uur 0 minuten
Bronnen
| Bron | Type |
|---|---|
|
Schrijven en tekenen https://youtu.be/g4TsY31SNbs |
Video |
|
How to use Pen to Draw https://youtu.be/FEmeLA78EZg |
Video |
|
Teach and Playback https://youtu.be/rNi40Z1ua3w |
Video |
|
How to use the Suction Cup https://youtu.be/rOuMJdfRxsw |
Video |
|
Dobot Gripper https://youtu.be/UfoEkJWgask |
Video |
|
DobotBlock Lab https://youtu.be/40R3eiPvnzA |
Video |