
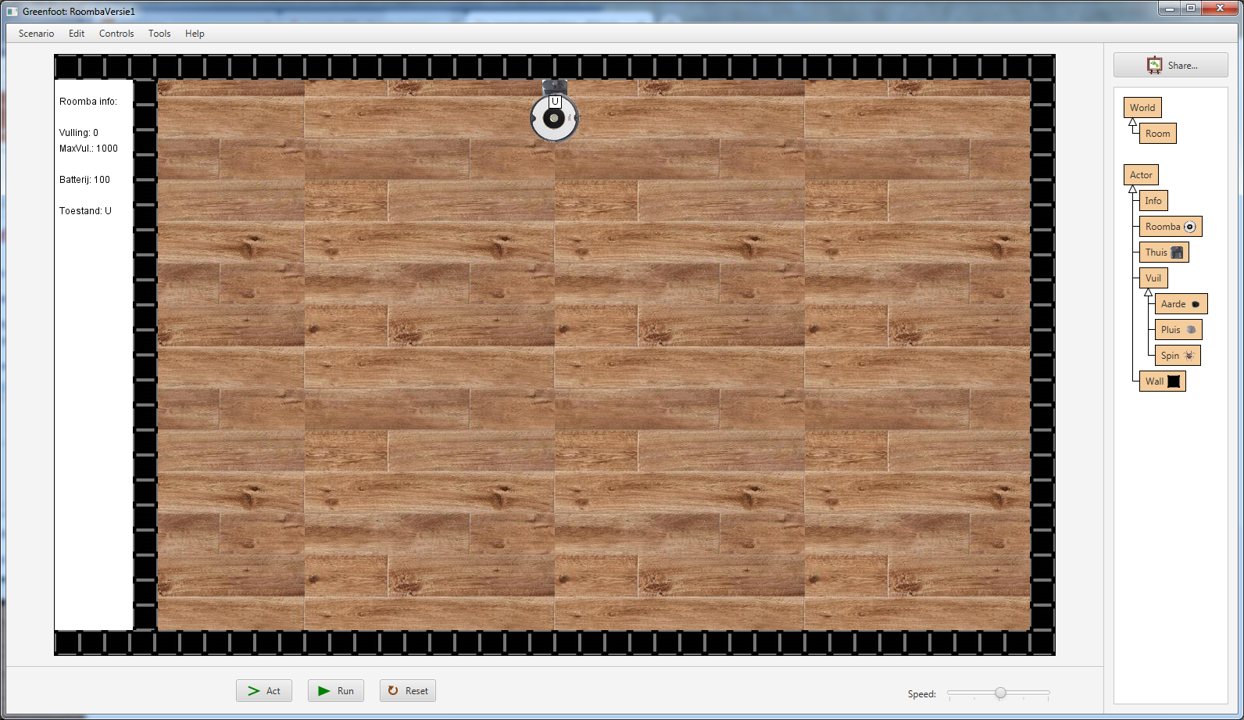
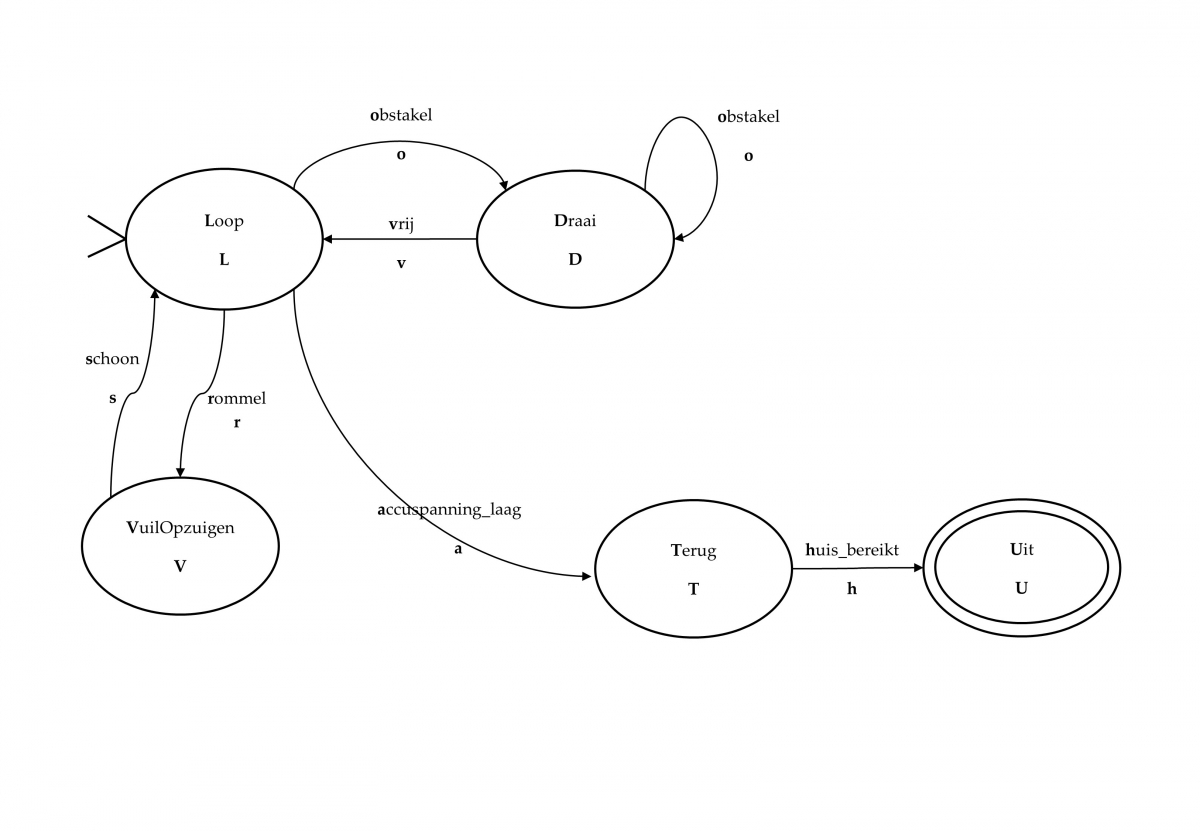
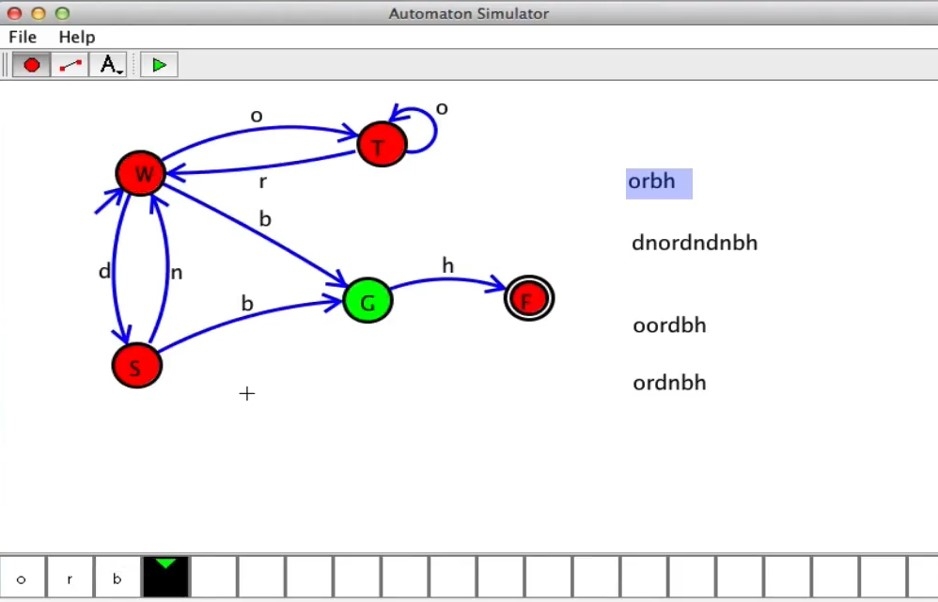
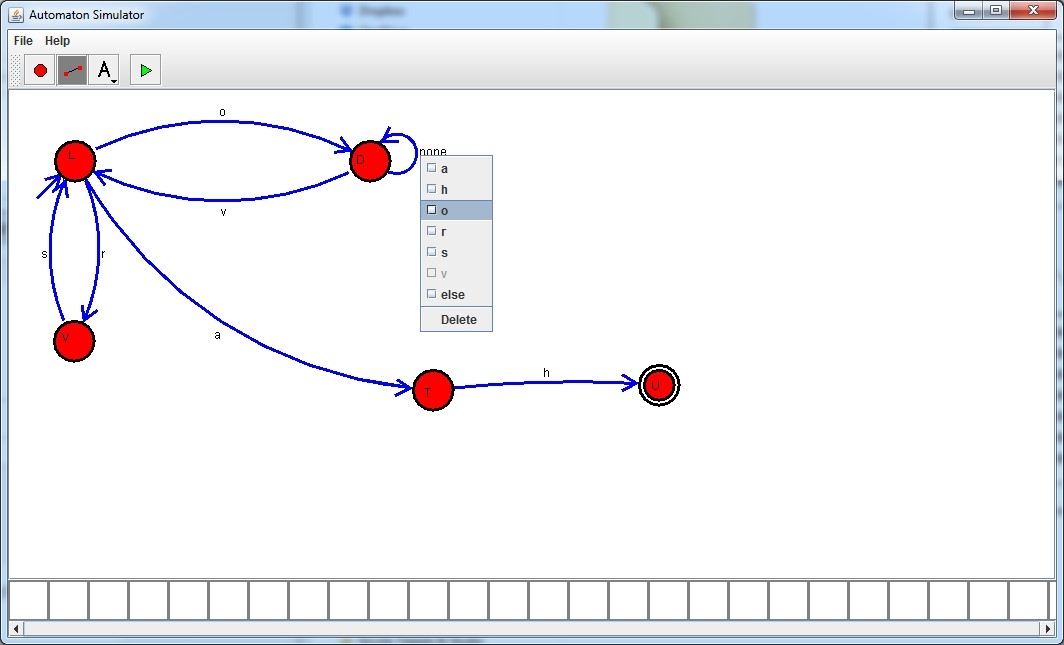
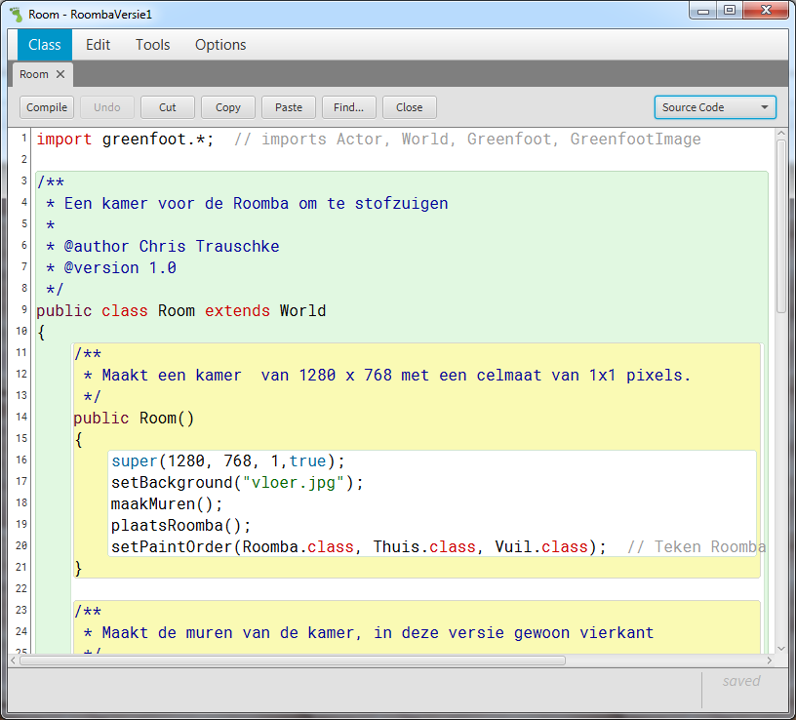
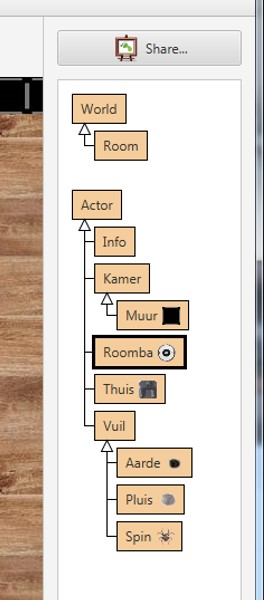
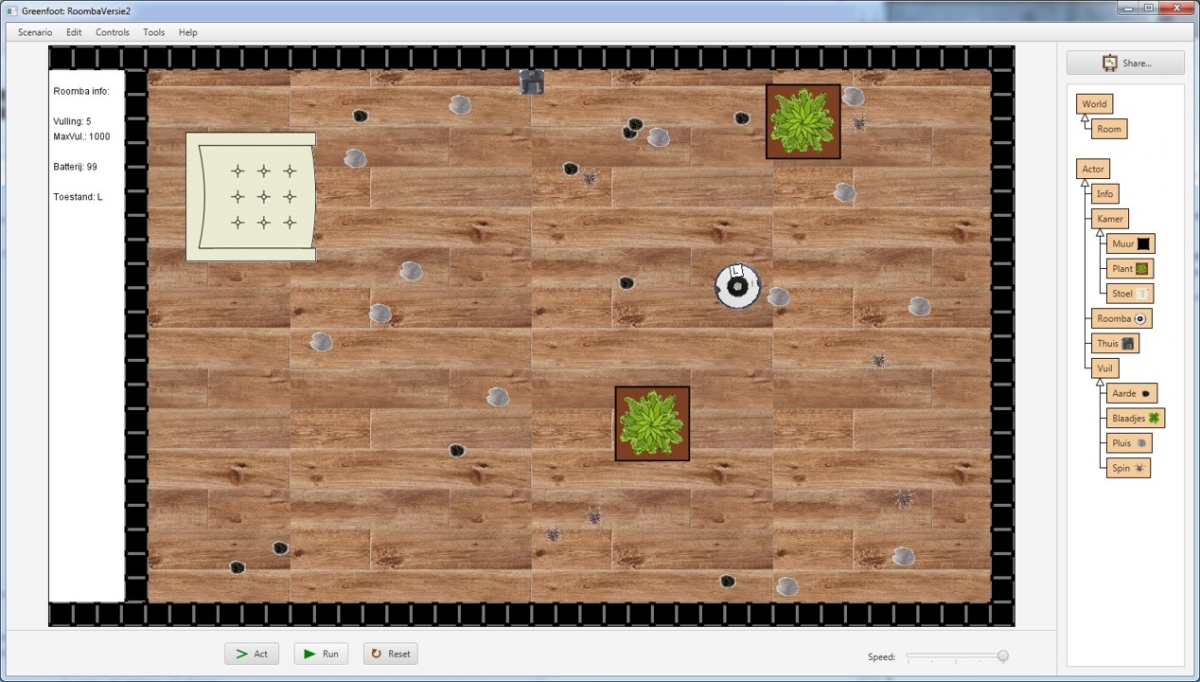
 Als voorbeeld begin je met een eenvoudige robotstofzuiger waarvan een deel van het model al bestaat, je breidt dit dan verder zelf uit aan de hand van de opdrachten. Je leert dus steeds in 3 stappen:
Als voorbeeld begin je met een eenvoudige robotstofzuiger waarvan een deel van het model al bestaat, je breidt dit dan verder zelf uit aan de hand van de opdrachten. Je leert dus steeds in 3 stappen: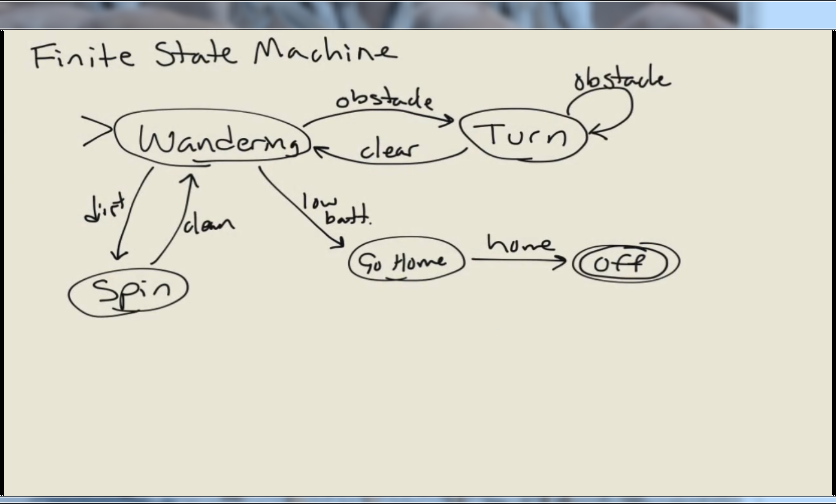


Het arrangement Reggesteyn_Automaten is gemaakt met Wikiwijs van Kennisnet. Wikiwijs is hét onderwijsplatform waar je leermiddelen zoekt, maakt en deelt.
- Auteur
- Laatst gewijzigd
- 21-02-2026 15:41:28
- Licentie
-


Dit lesmateriaal is gepubliceerd onder de Creative Commons Naamsvermelding 4.0 Internationale licentie. Dit houdt in dat je onder de voorwaarde van naamsvermelding vrij bent om:
- het werk te delen - te kopiëren, te verspreiden en door te geven via elk medium of bestandsformaat
- het werk te bewerken - te remixen, te veranderen en afgeleide werken te maken
- voor alle doeleinden, inclusief commerciële doeleinden.
Meer informatie over de CC Naamsvermelding 4.0 Internationale licentie.
Aanvullende informatie over dit lesmateriaal
Van dit lesmateriaal is de volgende aanvullende informatie beschikbaar:
- Toelichting
- In ontwikkeling, 1e versie zal rond me 2019 klaar zijn Lessenserie rond het onderwerp automaten uit kernprogramma 'grondslagen'. Door een programma of systeem te modelleren als een automaat met een (eindig) aantal toestanden kun je dit systeem bestuderen en testen.
- Leerniveau
- VWO 4; VWO 5;
- Leerinhoud en doelen
- Informatica;
- Eindgebruiker
- leerling/student
- Moeilijkheidsgraad
- gemiddeld
- Studiebelasting
- 20 uur 0 minuten
- Trefwoorden
- automaten, grondslagen
Bronnen
| Bron | Type |
|---|---|
|
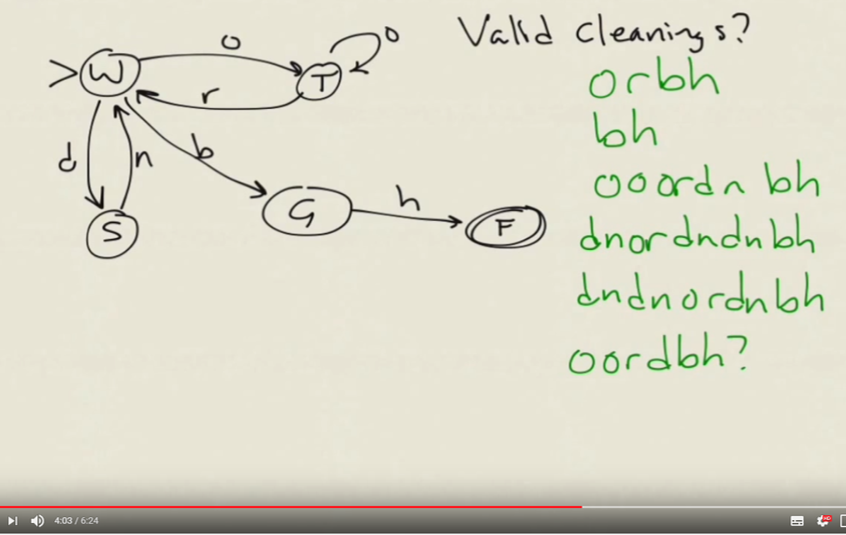
Learn about finite state machines (FSM) using a room-cleaning robot as an example. https://youtu.be/4XEK7OU2gIw |
Video |
|
Roomba 600 video https://youtu.be/Yf8MuJUGLlI |
Video |
|
Introductie video (kijk van 0:40 https://youtu.be/4XEK7OU2gIw |
Video |
|
Introductie video (kijk vanaf 3:00 tot 5:00) https://youtu.be/4XEK7OU2gIw |
Video |