




Het arrangement Inleiding Physical Computing is gemaakt met Wikiwijs van Kennisnet. Wikiwijs is hét onderwijsplatform waar je leermiddelen zoekt, maakt en deelt.
- Auteur
- Laatst gewijzigd
- 12-07-2019 12:44:05
- Licentie
-


Dit lesmateriaal is gepubliceerd onder de Creative Commons Naamsvermelding 4.0 Internationale licentie. Dit houdt in dat je onder de voorwaarde van naamsvermelding vrij bent om:
- het werk te delen - te kopiëren, te verspreiden en door te geven via elk medium of bestandsformaat
- het werk te bewerken - te remixen, te veranderen en afgeleide werken te maken
- voor alle doeleinden, inclusief commerciële doeleinden.
Meer informatie over de CC Naamsvermelding 4.0 Internationale licentie.
Aanvullende informatie over dit lesmateriaal
Van dit lesmateriaal is de volgende aanvullende informatie beschikbaar:
- Toelichting
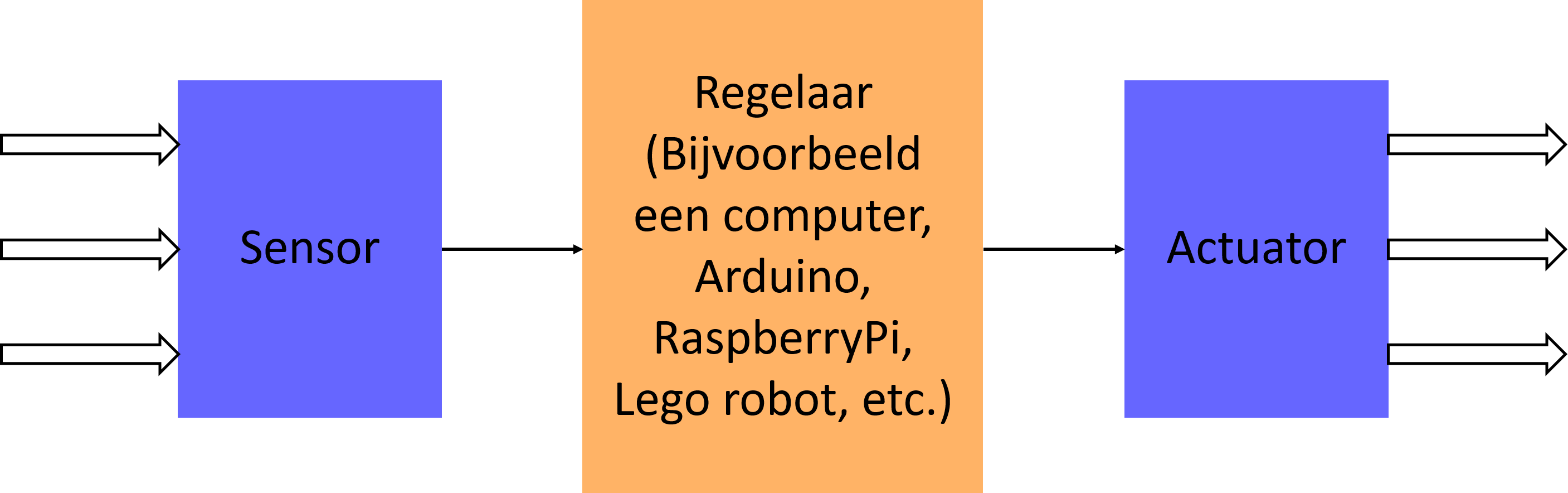
- We laten je zien dat physical computing overal terugkomt. In de stofzuiger, je mobiele telefoon, je sporthorloge, maar ook in de operatiekamer in het ziekenhuis. Daarnaast leer je over de opbouw van de module physical computing.
- Eindgebruiker
- leerling/student
- Moeilijkheidsgraad
- gemiddeld