




Het arrangement 24. Egg-bot (2012) is gemaakt met Wikiwijs van Kennisnet. Wikiwijs is hét onderwijsplatform waar je leermiddelen zoekt, maakt en deelt.
- Auteurs
- Laatst gewijzigd
- 04-05-2015 09:39:02
- Licentie
-



Dit lesmateriaal is gepubliceerd onder de Creative Commons Naamsvermelding-GelijkDelen 3.0 Nederland licentie. Dit houdt in dat je onder de voorwaarde van naamsvermelding en publicatie onder dezelfde licentie vrij bent om:
- het werk te delen - te kopiëren, te verspreiden en door te geven via elk medium of bestandsformaat
- het werk te bewerken - te remixen, te veranderen en afgeleide werken te maken
- voor alle doeleinden, inclusief commerciële doeleinden.
Meer informatie over de CC Naamsvermelding-GelijkDelen 3.0 Nederland licentie.
Dit materiaal is ontwikkeld door: Giel Oerlemans, Rachel Schampaert, Leanne Scheepers & Denise Slenter in het kader van het vak betadidactiek binnen de lerarenopleiding van de Eindhoven School of Education (TU/e) in opdracht van ASML4kids i.s.m. sCoolscience.
De gebruikte afbeeldingen en fragmenten zijn door ons gecontroleerd ten aanzien van hun rechtenvrije beschikbaarheid. Mocht hier onverhoopt toch een probleem blijken, neemt u dan contact op met esoe@tue.nl zodat wij het kunnen herstellen.

Aanvullende informatie over dit lesmateriaal
Van dit lesmateriaal is de volgende aanvullende informatie beschikbaar:
- Toelichting
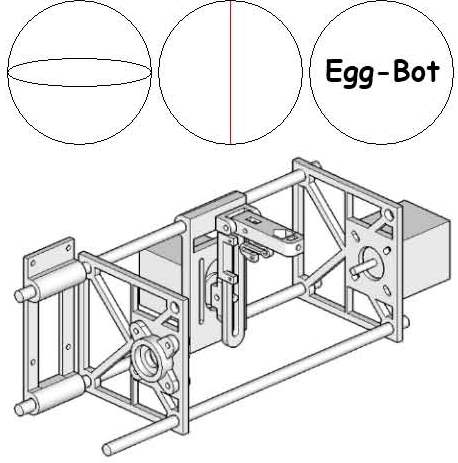
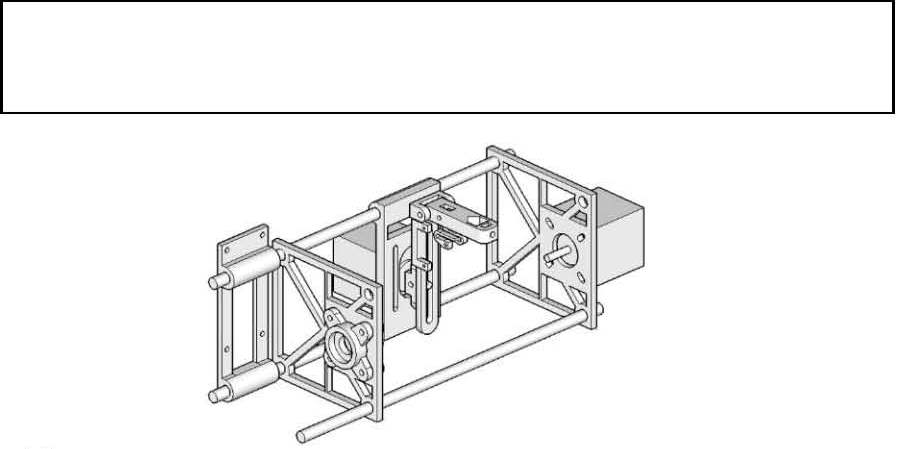
- ASML4kids organiseert workshops en rondleidingen voor middelbare scholieren, om iets terug te geven aan de samenleving. Daarnaast hopen ze leerlingen te motiveren om een wetenschappelijke studie te gaan doen en misschien wel later te gaan werken bij ASML. De studenten voor deze opdracht moeten een workshop ontwikkelen die na de rondleiding gebruikt kan worden. Het onderwijsproject is het Egg-Bot project geworden. De Egg-Bot is een robot die op bolvormige of eivormige voorwerpen kan printen. Door met het programma Inkscape een ontwerp te maken kan de Egg-Bot deze op bijvoorbeeld een kerstbal, ei, golfbal of pingpongbal printen. Een voorbeeld van een Egg-Bot is te vinden op de voorpagina.
- Leerniveau
- VMBO gemengde leerweg, 2; VMBO kaderberoepsgerichte leerweg, 1; VWO 2; VMBO kaderberoepsgerichte leerweg, 2; VMBO basisberoepsgerichte leerweg, 4; VMBO gemengde leerweg, 3; VMBO basisberoepsgerichte leerweg, 1; VMBO theoretische leerweg, 1; HAVO 4; HAVO 1; VMBO theoretische leerweg, 4; VWO 6; VMBO gemengde leerweg, 1; VMBO theoretische leerweg, 2; VMBO basisberoepsgerichte leerweg, 2; VWO 1; HAVO 3; VWO 3; HAVO 5; VWO 4; VMBO theoretische leerweg, 3; VMBO basisberoepsgerichte leerweg, 3; VMBO kaderberoepsgerichte leerweg, 4; HAVO 2; VMBO gemengde leerweg, 4; VWO 5; VMBO kaderberoepsgerichte leerweg, 3;
- Leerinhoud en doelen
- Algemene natuurwetenschappen; Techniek; Natuurkunde; Handvaardigheid;
- Eindgebruiker
- leerling/student
- Moeilijkheidsgraad
- gemiddeld
- Studiebelasting
- 1 uur 0 minuten
- Trefwoorden
- asml, beta, egg-bot, esoe, workshop