









 een game en in 3D.
een game en in 3D.





Het arrangement Techniek klas 2 is gemaakt met Wikiwijs van Kennisnet. Wikiwijs is hét onderwijsplatform waar je leermiddelen zoekt, maakt en deelt.
- Auteur
- Laatst gewijzigd
- 26-01-2026 21:22:28
- Licentie
-


Dit lesmateriaal is gepubliceerd onder de Creative Commons Naamsvermelding 3.0 Nederlands licentie. Dit houdt in dat je onder de voorwaarde van naamsvermelding vrij bent om:
- het werk te delen - te kopiëren, te verspreiden en door te geven via elk medium of bestandsformaat
- het werk te bewerken - te remixen, te veranderen en afgeleide werken te maken
- voor alle doeleinden, inclusief commerciële doeleinden.
Meer informatie over de CC Naamsvermelding 3.0 Nederland licentie.
Aanvullende informatie over dit lesmateriaal
Van dit lesmateriaal is de volgende aanvullende informatie beschikbaar:
- Toelichting
- Techniek klas 2
- Leerniveau
- VMBO theoretische leerweg, 1;
- Leerinhoud en doelen
- Techniek;
- Eindgebruiker
- leerling/student
- Moeilijkheidsgraad
- makkelijk
Bronnen
| Bron | Type |
|---|---|
|
Filmpjes van opdrachten delen met je docent. https://youtu.be/PRoWjXKcJtU?si=JteixuzKH64D38M6 |
Video |
|
Voorbeeld van een vulsysteem https://youtu.be/k3E-hsSY57E?si=nzxk-tGmQHmb-B41 |
Video |
|
Achteruit inparkeren. https://youtu.be/Y4-V0tE1U9g |
Video |
|
SketshUp for Schools installeren https://youtu.be/fxpbO3kXJNo |
Video |
|
SketchUp tekenen https://youtu.be/LeM_kCjuyJs |
Video |
|
Sketchup naar Bambu https://youtu.be/1aJCT_Cr-B4?si=sO1mtQ3tv0YDpwzb |
Video |
|
Huis tekenen en exporteren in SketchUp for Schools https://youtu.be/-a1rIHn8O4I |
Video |
|
Je huis tekenen met SketchUp https://youtu.be/Sn1iuHgJh2Y |
Video |
|
Van SketchUp naar Unity (VR en de game). https://youtu.be/cacmVErwTaA |
Video |
|
Starten met de MicroBit https://youtu.be/jsXtDDItE3c |
Video |
|
Je naam programmeren in licht. https://youtu.be/ey6bCUwgXlg |
Video |
|
Steen, papier, schaar. https://youtu.be/xQaE4dgO4l8 |
Video |
|
Een digitaal kompas. https://youtu.be/WV-jJ6ox7_g |
Video |
|
Thermometer. https://youtu.be/YkJq9MJ21C8 |
Video |
|
Microbit start https://youtu.be/jsXtDDItE3c |
Video |
|
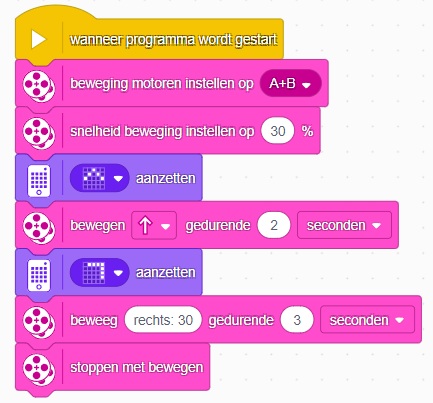
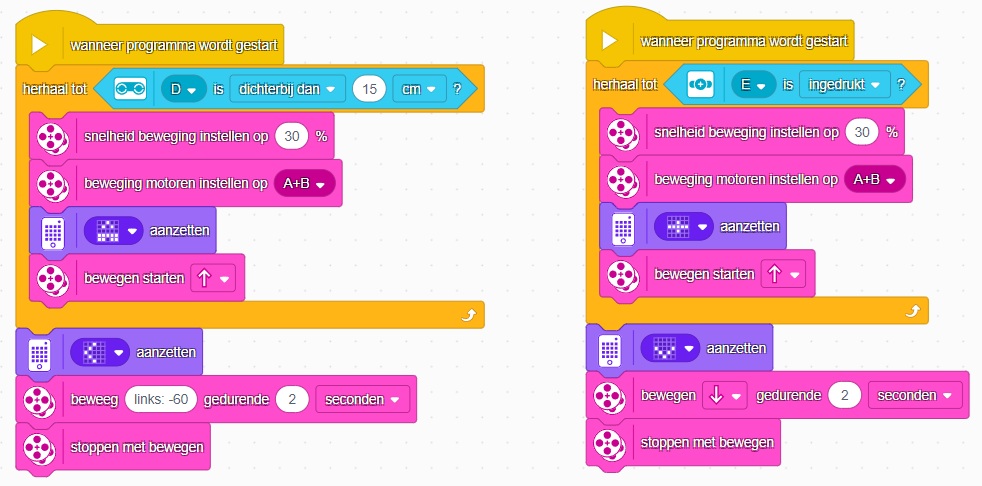
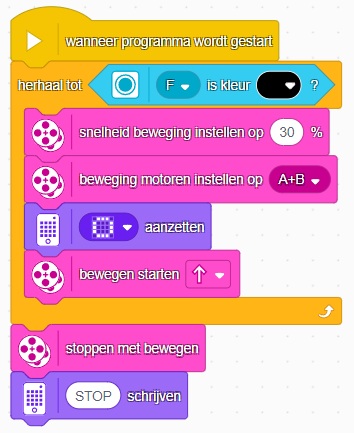
Maqueen (MicroBit autootje) https://youtu.be/xnjA1GeDPSI |
Video |
|
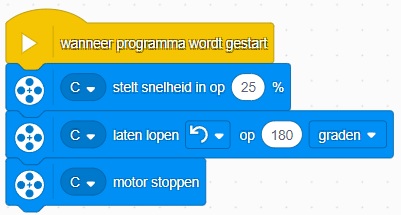
Monteren van de gripper en de lift. https://youtu.be/oVewuYsKrqc |
Video |
|
Programmeren van de gripper en de lift https://youtu.be/aI2WIM9qEeI |
Video |